

プロジェクト名称
過疎地活性化のための地球観測と高精度測位による
放牧地と放牧牛をモニタ可能な自動飼養システムの構築
-位置情報を活用して、牛の健康と畜産の持続可能性を守る-
Development of an Automatic Feeding System by Remote Monitoring of Grazing Cattle and Land Using Space Technologies for the Revitalization of Abandoned Farmland
- Protecting the Health of Grazing Cattle and the Sustainability of Livestock Industry through Location-Based Behavior Analysis -

概要
中山間地域の過疎地活性化を視野に、放牧地の適切な活用や放牧牛の状態に応じた飼料供給や遠隔飼養を可能とし、アニマルウエルフェアと地域の持続可能な畜産業に寄与するため、人工衛星による地球観測や高精度測位から得られるデータを活用して放牧地の状態や放牧牛の行動履歴をモニタリングする自動飼養システムを構築する。
放牧地として利用する耕作放棄地において、牛本来の生態に即した草飼育で肉品質を向上させる代謝プログラミング技術も活用し、地域生産者との連携のもと、実際の耕作放棄地と放牧牛を対象に本システムの有効性を検証する。
放牧地として利用する耕作放棄地において、牛本来の生態に即した草飼育で肉品質を向上させる代謝プログラミング技術も活用し、地域生産者との連携のもと、実際の耕作放棄地と放牧牛を対象に本システムの有効性を検証する。
実施地域
鹿児島県志布志市(黒毛和牛)
熊本県南阿蘇村(あか牛)
研究背景/目的
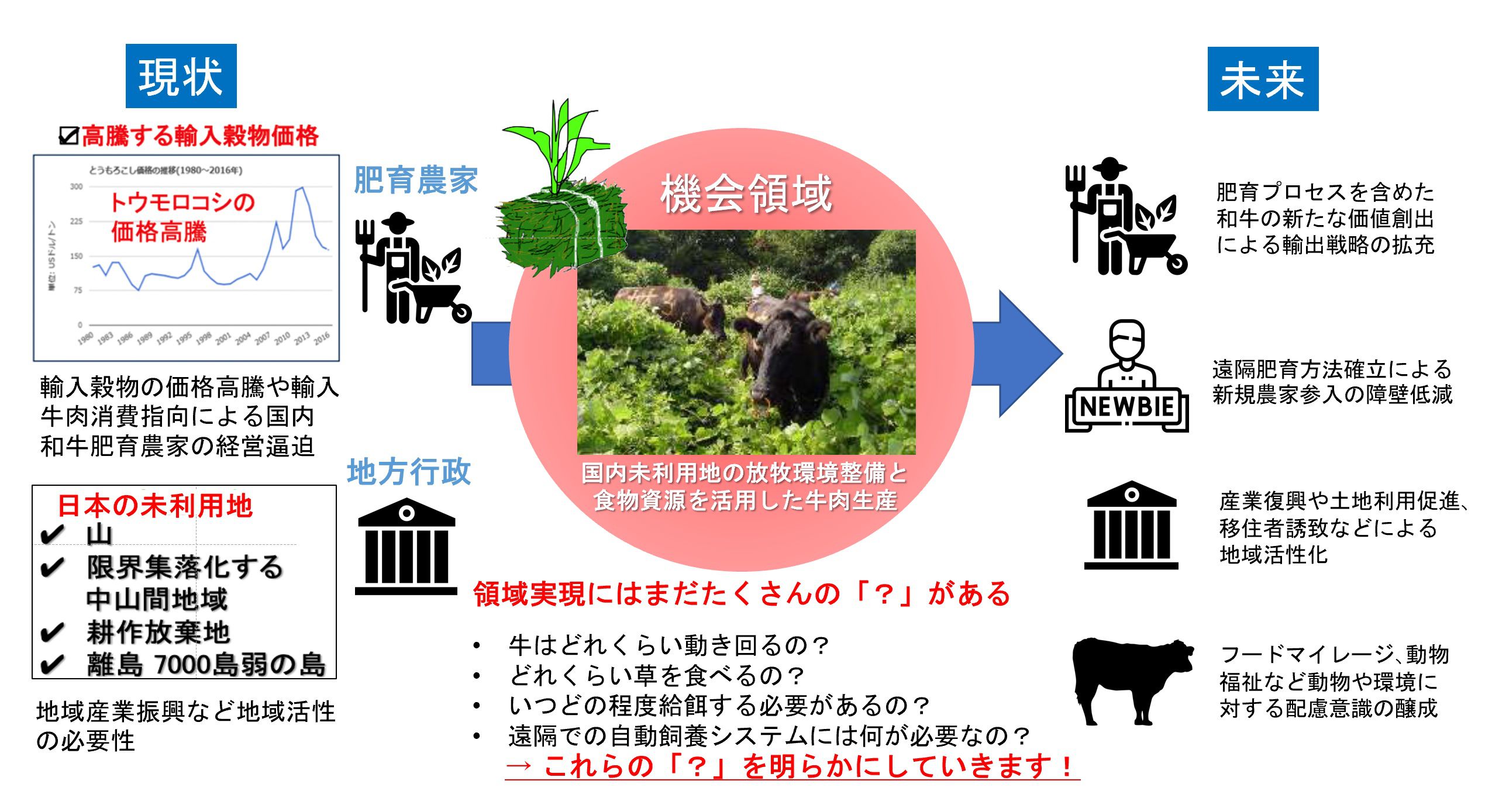
現在、日本の牛肉生産を支える中山間地域での畜産現場では、様々な問題を抱えています。飼料用輸入穀物の価格高騰によりコスト面で持続可能な営みが難しくなっていること、また牛舎内飼育がアニマルウェルフェアの観点で見直しが求められていること、そして、人口減少や高齢化を背景に手付かずな土地が荒れ、耕作放棄地が増えていることなどが主要な問題として挙げられます。
こうした問題を踏まえ、耕作放棄地で牛を放牧し、悠々自適に大地の草を食すことで景観を整え、牛の良好な健康状態を担保しつつ、持続可能な畜産業を成立させていくことが議論されていますが、肉質管理上で栄養価が高い輸入穀物飼料が有効な一方で、放牧地の草だけを飼料とすると肉質を担保できないため、牛の運動量など行動パターンに合わせた適切な量の草飼料を与えていく必要があります。しかしながら、急峻な地形がゆえに点在する放牧地への移動を要する牛の体調や飼育管理は、畜産業事業者の作業負荷になっていることも問題となっています。
本研究は、これら複数の問題を包括的に解決するために、現地のステークホルダのニーズも踏まえ、位置情報を活用して牛の行動を理解し、遠隔で適切な給餌を行い、持続可能な畜産業に資する自動飼養システムを構築することを目的としています。
研究方法
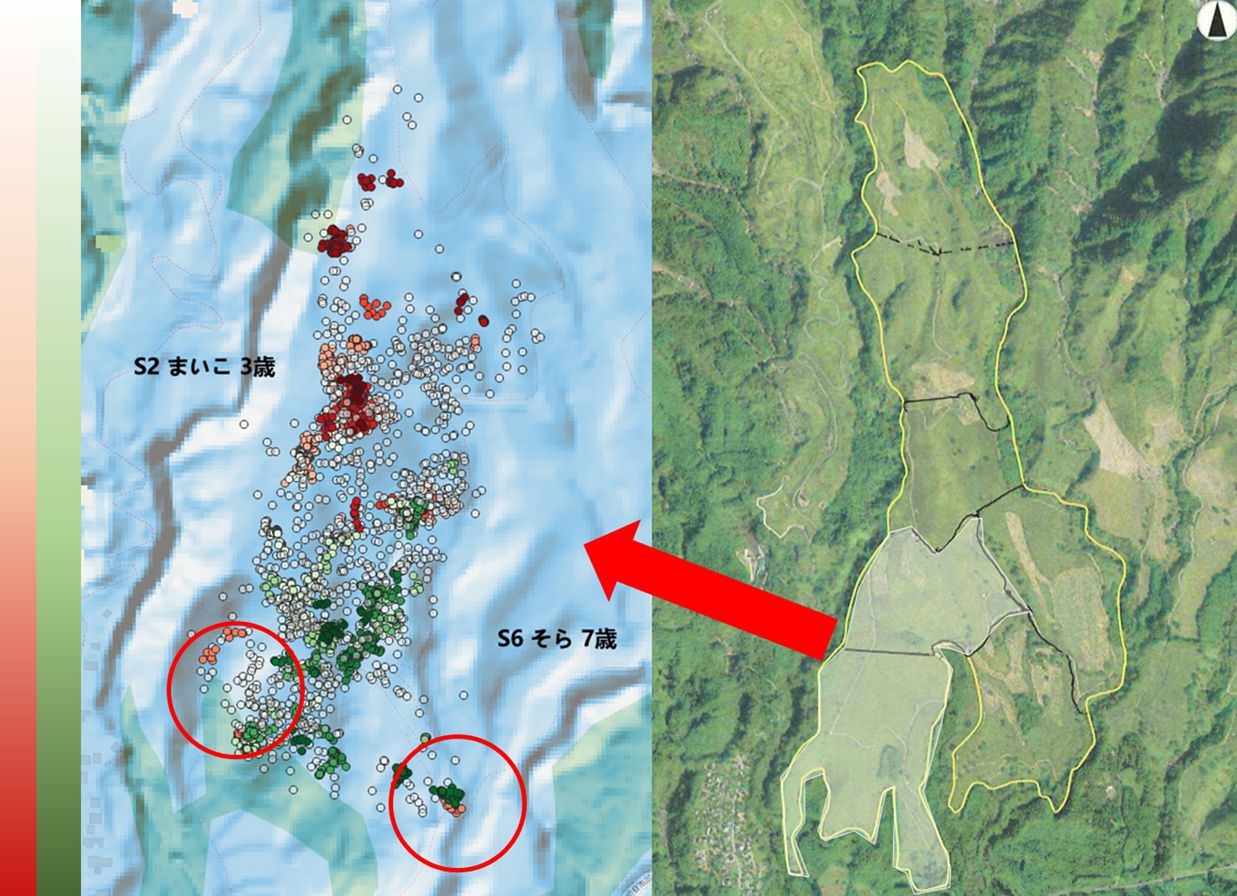
衛星データとフィールドワークによる観察で、牛の行動を精密にパターン化する
この牛は今、食べているのか?反芻しているのか?水を飲んでいるのか?休んでいるのか?眠っているのか?―未知の領域である牛の行動を把握するため、人工衛星による地球観測から得られる放牧地の草の状況や、GPSや準天頂衛星みちびきなどのマルチGNSSを活用した高精度測位により得られる位置情報をもとに、牛の運動量や移動距離、採食行動などのデータを取得し、集積していきます。また地理的状況や放牧地の草の状況と牛の行動パターンとの関連の分析も行うと同時に、運用コストを考慮した補助飼料供給の最適化算出に必要な行動履歴データの要求精度と要求取得頻度の指標もを開発しています。
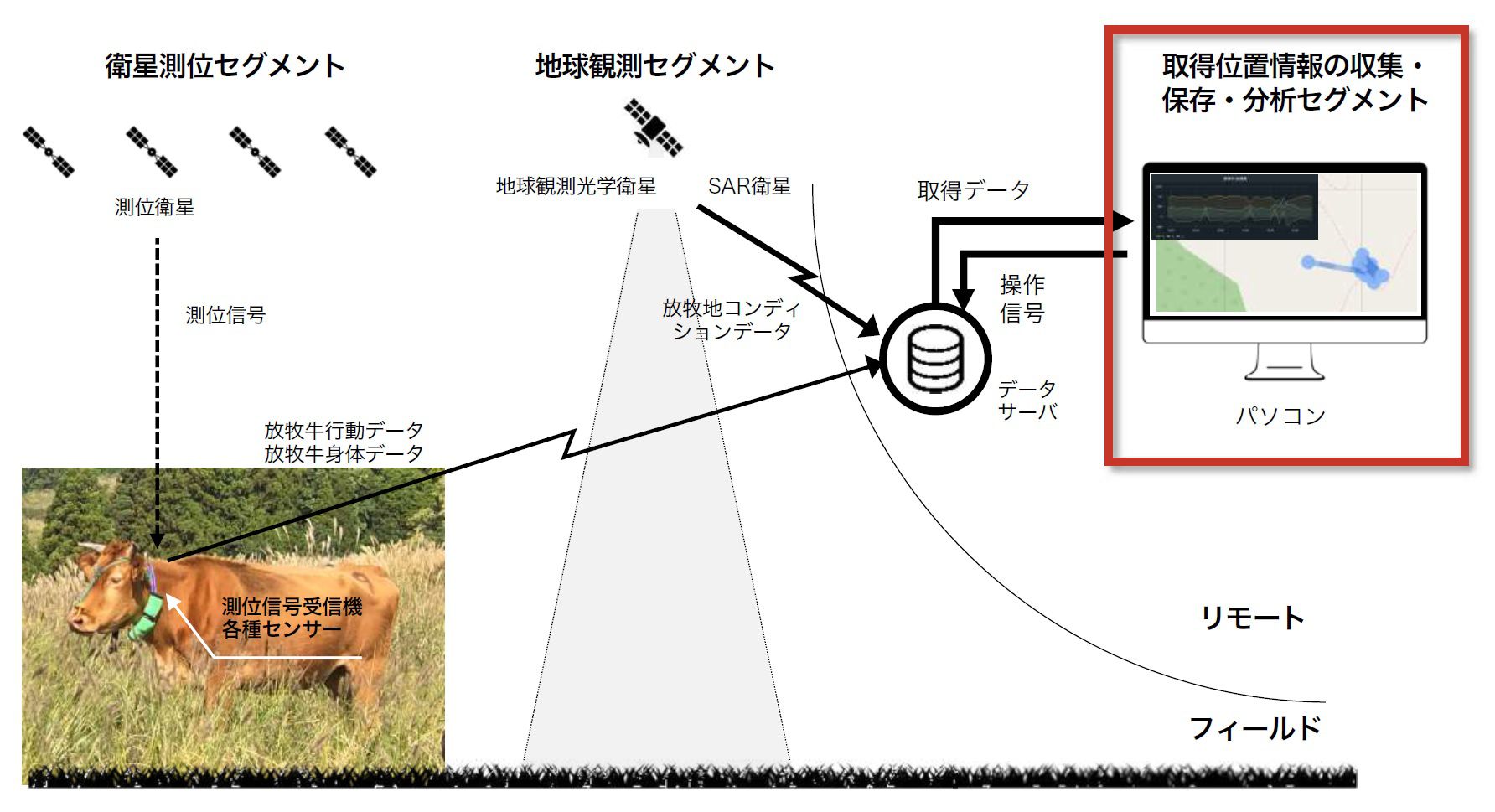
高精度測位による牛の行動履歴データ取得の流れ
地形や季節、また牛の種類によっても採食を含めた行動パターンは異なるため、放牧現場での視覚的な観察や、長年畜産に携わってきた生産者たちの暗黙知に基づいた分析なども欠かせません。リモートによる各種センシングと、現場観察両方のデータから、牛の行動をどう読み取るかに注力し、精密に行動のパターン化を図っていくことが本研究の注力ポイントと言えます。モニタリングした運動量や滞在地の特徴、採食状況などの行動をどう読み取るかが重要であり、行動を理論的に説明できるパターン化を目指しています。

首に受信機をつけた牛の放牧の様子


自動給餌機で餌を食べる牛たちを遠隔で見守る様子
また、高精度測位であっても取得する位置情報にある程度のゆらぎがあるなかで、測位精度のバウンダリーをどう決めていくかも大切な観点となります。自動飼養システムの実装にあたり、地域で畜産を担う事業者が、どのようなデータを扱い、活用していくのか?というニーズを考慮し、計測間隔やデータの粒度を判断していく必要があります。
例えば、10分間隔の測位データで測れる牛の運動量をもとに給餌に関する意思決定が可能な場合、より質の高いデータが得られる1分間隔のデータより適切と捉えることができます。衛星画像やセンシングの質や量により、データの扱い方のハードルもコストも高くなるため、持続可能な牛肉生産システムに即した、運用性の高い計測方法を目指さなくてはなりません。
例えば、10分間隔の測位データで測れる牛の運動量をもとに給餌に関する意思決定が可能な場合、より質の高いデータが得られる1分間隔のデータより適切と捉えることができます。衛星画像やセンシングの質や量により、データの扱い方のハードルもコストも高くなるため、持続可能な牛肉生産システムに即した、運用性の高い計測方法を目指さなくてはなりません。
研究成果/展望
地域での自律的な運用―放牧マネジメントを目指して
研究者の手から離れて地域での実装のフェーズにおいては、データから得られた牛の行動パターンから、放牧のマネジメント計画ができることが理想です。つまり、牛個体の年齢や土地の大きさ、植生情報などから「この牧野に1カ月放せば大丈夫、1カ月後にまた別の場所に移動させる」という意思決定がなされることです。
本研究を通じて、畜産現場での経験から得られる暗黙知から、より精密で論理的な牛の行動パターン化が可能になり自動飼養システムが適切に運用されれば、人手による作業工数を減らし、新規参入の壁をも下げることにつながります。中山間地域での畜産業の活性化がひいては地域活性にもつながります。
本研究を通じて、畜産現場での経験から得られる暗黙知から、より精密で論理的な牛の行動パターン化が可能になり自動飼養システムが適切に運用されれば、人手による作業工数を減らし、新規参入の壁をも下げることにつながります。中山間地域での畜産業の活性化がひいては地域活性にもつながります。
キーワード
高精度測位
測位衛星からの電波を受信して観測地点の緯度経度情報と時刻を算出すること。
三次元での位置(x,y,z)と時刻の4つの変数を特定するので原理的に最低4機の測位衛星が必要だが、数が増えることで観測地点の位置をより高い精度で特定できる。米国のGPS、日本の準天頂衛星(QZSS)、ロシアのGLONASS、欧州連合のGallileo、中国のBeiDouなどの複数の衛星測位システムを総称してGNSS (Global Navigation Satellite System)といい、GNSSからの複数の電波を利用して高精度に測位する技術がマルチGNSSである。一般的に観測地点の1台の受信機により観測地点の位置情報を求めることを単独測位、2台上の受信機を使いそれらの相対的な位置関係から求めることを相対測位という。前者はGPSのみの利用で約10m~20m程度、マルチGNSSで数mの誤差が生じるのに対し、後者の測位手法のひとつで、すでに位置情報がわかっている基準点のデータを利用して即時に位置情報を解析処理するRTK(リアルタイムキネマティック)測位では、cm級の測位が可能である。RTK測位など高い取得データ精度を利用するシステムではその信頼性と安全性を担保できる一方、受信機の性能、電力供給維持や設備など相応の運用環境の構築と維持管理が必要になるため、目的と実現可能性を考慮した要求精度を分析する必要がある。
三次元での位置(x,y,z)と時刻の4つの変数を特定するので原理的に最低4機の測位衛星が必要だが、数が増えることで観測地点の位置をより高い精度で特定できる。米国のGPS、日本の準天頂衛星(QZSS)、ロシアのGLONASS、欧州連合のGallileo、中国のBeiDouなどの複数の衛星測位システムを総称してGNSS (Global Navigation Satellite System)といい、GNSSからの複数の電波を利用して高精度に測位する技術がマルチGNSSである。一般的に観測地点の1台の受信機により観測地点の位置情報を求めることを単独測位、2台上の受信機を使いそれらの相対的な位置関係から求めることを相対測位という。前者はGPSのみの利用で約10m~20m程度、マルチGNSSで数mの誤差が生じるのに対し、後者の測位手法のひとつで、すでに位置情報がわかっている基準点のデータを利用して即時に位置情報を解析処理するRTK(リアルタイムキネマティック)測位では、cm級の測位が可能である。RTK測位など高い取得データ精度を利用するシステムではその信頼性と安全性を担保できる一方、受信機の性能、電力供給維持や設備など相応の運用環境の構築と維持管理が必要になるため、目的と実現可能性を考慮した要求精度を分析する必要がある。
研究関連情報
<連携・協力機関>
国立大学法人 鹿児島大学 後藤貴文
熊本県地域振興課
熊本県南阿蘇町役場
下磧牧野組合
協力機関:
株式会社さかうえ 坂上隆
宇宙航空研究開発機構 上村俊作
再委託機関:
一般財団法人リモートセンシング技術センター(RESTEC)
<実施期間>
2020年4月~2023年3月
<研究論文>
Yunying Shi, Akira Kodaka, Naohiko Kohtake, Supporting Management Scenario Evaluation for Small-scale Grazing Systems by Modeling the Adaptive Behavior of Cattle. CESUN 2021 Engineering Systems Symposium, 2021.
国立大学法人 鹿児島大学 後藤貴文
熊本県地域振興課
熊本県南阿蘇町役場
下磧牧野組合
協力機関:
株式会社さかうえ 坂上隆
宇宙航空研究開発機構 上村俊作
再委託機関:
一般財団法人リモートセンシング技術センター(RESTEC)
<実施期間>
2020年4月~2023年3月
<研究論文>
Yunying Shi, Akira Kodaka, Naohiko Kohtake, Supporting Management Scenario Evaluation for Small-scale Grazing Systems by Modeling the Adaptive Behavior of Cattle. CESUN 2021 Engineering Systems Symposium, 2021.
慶應義塾大学大学院システムデザイン・マネジメント研究科
センシング・デザインラボ(神武研究室)
〒223-8526
横浜市港北区日吉4-1-1 協生館
Tel: 045-564-2518 Fax: 045-562-3502
センシング・デザインラボ(神武研究室)
〒223-8526
横浜市港北区日吉4-1-1 協生館
Tel: 045-564-2518 Fax: 045-562-3502
Copyright © 2025 Sensing & Design Lab.